Hagræðing árangurs með MPU-6050: Uppsetning, kvörðun og forrit
2024-04-25
9248
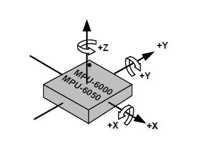
MPU-6050 er fyrsti samþættur 6-ás hreyfivinnsluþáttur heims, sem samþættir 3-ás gyroscope, 3-ás hröðunarmæli og stigstærð stafræn hreyfing örgjörva (DMP).Tilgangurinn með því að nota það er að fá hallahorn hlutarins sem á að mæla (svo sem quadcopter, jafnvægisbíll) á x, y og z ásunum, það er að segja kastahornið, rúlluhornið og yaw hornið.Við lesum sex gögn MPU-6050 (þriggja ás hröðunargildi og þriggja ás hyrndarhraða AD gildi) í gegnum I2C viðmótið.Eftir vinnslu á samruni á líkamsstöðu er hægt að reikna vellinum, rúllu og yawhorn.Sem stefnuviðmiðun fyrir mælingargildi er skilgreiningin á hnitastefnu skynjara eins og sýnt er á myndinni hér að neðan, sem fylgir meginreglunni um hægri hönd hnitakerfisins (það er að hægri þumalfingur bendir á jákvæða stefnu X-Axis, vísifingurinn bendir á jákvæða stefnu Y-ássins og löngutöngur bendir á jákvæða stefnu z-ássins.
Vörulisti
Með sérstökum I2C skynjara strætó sínum er MPU-6050 fær um að fá inntak beint frá utanaðkomandi 3-ás áttavita, sem veitir fullan 9-ás Motionfusion ™ framleiðsla.Það útrýmir misræmisvandanum á milli sameinaðs gyroscope og tímalínu eldsneytisgjöfanna og dregur verulega úr umbúðarrými samanborið við lausnir í fjölþáttum.Þegar MPU-60x0 er tengdur við þriggja ás segulmælir er MPU-60X0 fær um að veita fullan 9 ás hreyfingarsamruna framleiðsla í aðal I2C eða SPI tengi (athugaðu að SPI tengið er aðeins fáanlegt á MPU-6000).
Val og jafngildi
- MPU-3300
- MPU-6000
- MPU-6500
Framleiðandi MPU-6050
Framleiðandi MPU-6050 er TDK.Eftir að tveir stofnendur TDK, Dr. Yogoro Kato og Takei Takei, fundu upp Ferrite í Tókýó, stofnuðu þeir Tókýó Denkikagaku Kogyo K.K.Árið 1935. Sem alþjóðlegt vörumerki rafeindatækniiðnaðar hefur TDK alltaf haldið ríkjandi stöðu á sviði rafrænna hráefna og rafrænna íhluta.Alhliða og nýsköpunardrifin vöruvagn TDK nær yfir óbeinar íhlutir eins og keramikþéttar, ál rafgreiningarþéttar, filmuþéttar, segulmagnaðir vörur, hátíðni íhlutir, piezoelectric og verndartæki, svo og skynjara og skynjara (svo sem hitastig og þrýstingur, þrýstingur, þrýstingur, verndartæki, svo og skynjara og skynjara (svo sem hitastig og þrýstingur, þrýstingur, þrýstingur, þrýstingur, og verndartækjum, svo og skynjara og skynjara (svo sem hitastig og þrýstingur, þrýstingur, þrýstingur, og verndartækjum, svo og skynjara og skynjara (svo sem hitastig og þrýstingur, þrýstingur, þrýstingur og verndartæki, svo og skynjara og skynjara (svo sem hitastig og þrýstingur, þrýstingur, og verndartæki, svo og skynjari og skynjara (svo sem hitastig og þrýstingur, þrýstingur, og verndartæki, svo og skynjari og skynjara (svo sem hitastig og þrýstingur, þrýstingur, og verndartæki, svo “Segul- og MEMS skynjarar) osfrv. Að auki veitir TDK einnig aflgjafa og orkutæki, segulmagnaðir höfuð og aðrar vörur.Vörumerki þess eru TDK, EPCOS, Invensense, Micronas, Tronics og TDK-Lambda.
Innri blokk skýringarmynd af MPU-6050
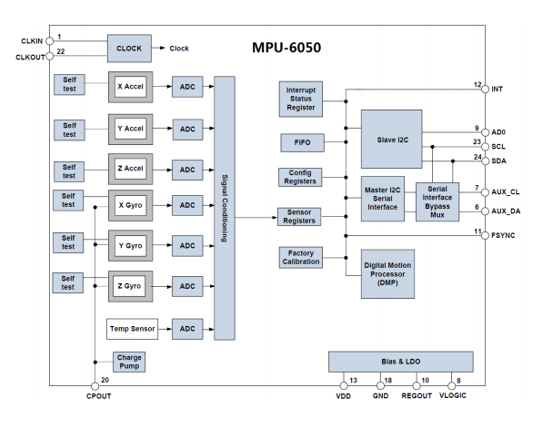
Meðal þeirra eru SCL og SDA IIC tengin tengd MCU og MCU stjórnar MPU-6050 í gegnum þetta IIC viðmót.Það er líka IIC viðmót, nefnilega AUX_CL og Aux_da.Hægt er að nota þetta viðmót til að tengja utanaðkomandi þræl tæki, svo sem segulskynjara, til að mynda níu ás skynjara.VLOGIC er IO Port spennu.Þessi pinna getur stutt að lágmarki 1,8V.Við tengjum það venjulega beint við VDD.AD0 er heimilisfangastjórn pinna þrælsins IIC viðmótsins (tengt við MCU).Þessi pinna stjórnar lægsta hluti IIC heimilisfangsins.Ef það er tengt við GND er IIC heimilisfang MPU-6050 0x68;Ef það er tengt við VDD er það 0x69.Vinsamlegast hafðu í huga að heimilisfangið hér inniheldur ekki lægsta hluti gagnaflutnings (lægsti hluti er notaður til að tákna les- og skrifaðgerðir).Á MWbalancedstc15 er AD0 tengt við GND, þannig að IIC heimilisfang MPU-6050 er 0x68 (að undanskildum lægsta bitanum).
Frumstilla IIC viðmótið
MPU-6050 notar IIC til að eiga samskipti við STC15, þannig að við þurfum að frumstilla SDA og SCL gagnalínurnar sem tengjast MPU-6050 fyrst.
Endurstilla MPU-6050
Þetta skref endurheimtir allar skrár inni í MPU-6050 í sjálfgefin gildi þeirra, sem er náð með því að skrifa 1 til Bit7 í Power Management Register 1 (0x6b).Eftir endurstillingu verður orkustjórnunarskrá 1 endurreist í sjálfgefið gildi (0x40) og í kjölfarið verður að stilla þessa skrá á 0x00 til að vekja MPU-6050 og setja hana í venjulegt vinnustað.
Stilltu svið í fullri stærð á hornhraða skynjara (gyro) og hröðunarskynjara
Í þessu skrefi stillum við fullri stærð (FSR) skynjara tveggja í gegnum Gyroscope Configuration Register (0x1b) og Acceleration Sensor Configuration Register (0x1c) í sömu röð.Venjulega stillum við fullri stærð gyroscope á ± 2000dps og í fullri stærð svið hröðunarmælisins til ± 2G.
Settu aðrar breytur
Hér þurfum við einnig að stilla eftirfarandi breytur: slökkva á truflunum, slökkva á AUX I2C viðmótinu, slökkva á FIFO, stilla sýnatökuhraða gyroscope og stilla stafræna lágpassasíuna (DLPF).Þar sem við notum ekki truflanir til að lesa gögn í þessum kafla þarf að slökkva á truflunaraðgerðinni.Á sama tíma, þar sem við erum ekki að nota AUX I2C viðmótið til að tengja aðra ytri skynjara, þurfum við einnig að loka þessu viðmóti.Hægt er að stjórna þessum aðgerðum í gegnum truflunarvirkni (0x38) og notendastýringarskrá (0x6a).MPU-6050 getur notað FIFO til að geyma skynjara gögn, en við höfum ekki notað þau í þessum kafla, svo að öllum FIFO rásum þarf að loka.Hægt er að stjórna þessu í gegnum FIFO Virkjuna (0x23).Sjálfgefið er að gildi þessarar skrár er 0 (það er, FIFO er óvirkt), svo við getum notað sjálfgefið gildi beint.Sýnatökuhraði gyroscope er stjórnað af sýnatökuhraða skráningarskránni (0x19).Venjulega stillum við þennan sýnatökuhraða á 50. Stillingar stafrænu lágpassasíunnar (DLPF) er lokið í gegnum stillingarskrána (0x1a).Almennt séð munum við stilla DLPF á helming bandbreiddarinnar til að halda jafnvægi á nákvæmni gagna og viðbragðshraða.
Stilltu kerfisklukkuna og virkjaðu hornhraða skynjara og hröðunarskynjara
Stilling kerfis klukkunnar fer eftir orkustjórnunarskrá 1 (0x6b), þar sem lægstu þrír bitar þessarar skrár ákvarða val á klukkuuppsprettunni.Sjálfgefið er að þessir þrír bitar eru stilltir á 0, sem þýðir að kerfið notar innri 8MHz RC sveifluna sem klukkuuppsprettu.Hins vegar, til þess að bæta nákvæmni klukkunnar, stillum við það oft á 1 og veljum X-ás gyroscope PLL sem klukkuuppsprettu.Að auki er það mikilvægt skref í frumstillingarferlinu sem gerir kleift að virkja hraða skynjara og hraða skynjara.Báðar aðgerðirnar eru útfærðar í gegnum Power Management Register 2 (0x6c).Stilltu einfaldlega samsvarandi bita á 0 til að virkja samsvarandi skynjara.Eftir að hafa lokið ofangreindum skrefum getur MPU-6050 farið inn í eðlilega vinnu.Þessar skrár sem ekki eru sérstaklega stilltar munu nota sjálfgefin gildi forstillt af kerfinu.
Hvernig virkar MPU-6050?
Gyro skynjari
Skynjarinn er búinn gyro inni, sem mun alltaf vera samsíða upphafsstefnu vegna gyroscopic áhrifanna.Þess vegna getum við reiknað stefnu og snúningshorn með því að greina frávik gírósins frá upphafsstefnu.
Hröðunarmælir skynjari
Hröðunarmælir skynjari er tæki sem getur mælt hröðun og það virkar út frá meginreglunni um rafræn áhrif.Meðan á hröðun stendur mælir skynjarinn tregðukraftinn sem beitt er við massablokkina og reiknar síðan hröðunargildið með því að nota önnur lög Newtons.
Digital Motion örgjörvi (DMP)
DMP er gagnavinnslueining í MPU6050 flísinni sem er með innbyggðan Kalman síunaralgrími til að afla gagna frá gyroscope og hröðunarmælinum og vinna úr framleiðslunni.Þessi aðgerð dregur mjög úr vinnuálagi útlæga örgjörvans og forðast leiðinlega síun og samrunaferli gagna.
Athugasemdir:
Fjórðungar: Fjórðungar eru einfaldar ofurflokkar tölur.Flóknar tölur eru samsettar úr rauntölum auk ímyndaða einingar I, þar sem I^2 = -1.
Hvar er MPU-6050 notað?
- leikföng
- símtól og flytjanlegur leikja
- Hreyfingarbundnar leikstýringar
- Blurfree ™ tækni (fyrir myndband/kyrrð myndar)
- AirSign ™ tækni (til öryggis/sannvottunar)
- Augnablik ™ IG ™ látbragðsþekking
- Wearable Skynjarar fyrir heilsu, líkamsrækt og íþróttir
- Hreyfibúnaðar- og forritarammi
- MotionCommand ™ tækni (fyrir bending styttingar)
- Staðsetningarþjónusta, áhugaverðir staðir og dauðir reikningar
- 3D fjarstýringar fyrir nettengda DTV og stilla toppkassa, 3D mýs
- Touchanywhere ™ tækni (fyrir „No Touch“ UI forritstýringu/siglingar)
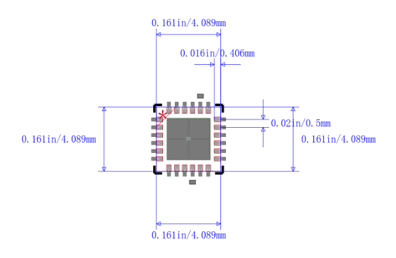
Pakki af MPU-6050
Hvernig á að draga úr hávaða MPU-6050?
Við getum tekið eftirfarandi leiðir til að draga úr hávaða MPU-6050.
Notaðu kvarðaða skynjara
Með því að kvarða hröðunarmælinum og gyroscope MPU-6050 getur útrýmt hlutdrægni og villu skynjaranna sjálfra og þannig dregið úr áhrifum hávaða.Kvörðunarferlið samanstendur venjulega af tveimur áföngum: truflanir kvörðun og kvörðun.
Síunarferli vélbúnaðar
Með því að bæta síuþéttum við rafmagnslínuna MPU-6050 getur það dregið úr áhrifum aflgjafa hávaða á skynjarann.Á meðan, við PCB skipulag, ættum við að reyna að halda MPU-6050 frá hugsanlegum truflunum, svo sem hátíðni merkilínum og háum krafti.
Vinnsla hugbúnaðar sía
Eftir að hafa safnað hráum gögnum frá MPU-6050 getum við bætt við hugbúnaðarsíunartengli til að vinna að upphafsgögnum til að útrýma truflunum af völdum hávaða.Algengt er að nota hugbúnaðarsíun að meðaltali síun, miðgildi síun, Kalman síun og svo framvegis.
Notaðu innri lágpassasíu
MPU-6050 er með innri samþætta stafræna lágpassasíu, sem hægt er að nota til að draga úr hátíðni hávaða með því að stilla niðurskurðartíðni sína.Nánar tiltekið getum við stillt niðurskurðartíðni stafrænu síunnar með því að breyta stillingarskrá MPU-6050 til að útrýma hátíðni hávaða af völdum A/D sýnatöku.
MPU-6050 byggð hreyfibraut
MPU-6050 er sex ás hröðunarmælir og gyroscope skynjari sem hægt er að nota til að mæla hreyfingu og afstöðu hlutar.Útreikningur hreyfibrautarinnar byggður á MPU-6050 er hægt að veruleika með eftirfarandi skrefum:
Fyrsta skrefið er að lesa skynjaragögnin.Við verðum að lesa hröðunarmælir og gyroscope gögn frá MPU-6050 skynjunum sem nota viðeigandi ökumenn og bókasafnsaðgerðir.Þessi gögn eru venjulega gefin út á stafrænu sniði, þannig að einhver umbreyting og kvörðun er nauðsynleg til að umbreyta þeim í raunverulegar mælingar í líkamlegum einingum.
Annað skrefið er að reikna hröðunina.Í fyrsta lagi verðum við að vinna úr gögnum frá hröðunarmælinum til að öðlast hröðun hlutarins í hverjum ás.Í kjölfarið, til að reikna út hraða og tilfærslu hlutarins á hverjum ás, verðum við að samþætta hröðunargögnin.Tölulegar samþættingartækni, svo sem aðferð Euler eða Lunger-Kutta aðferðin, eru oft notuð í þessu ferli til að tryggja nákvæmni útreikninga á tilfærslu.
Þriðja skrefið er að reikna út hornhraða.Með því að nota gyroscope gögn er hægt að reikna út hornhraða hlutarins í hverjum ás.Aftur þarf að kvarða þessi gögn og breyta til að fá hornhraða í raunverulegum líkamlegum einingum.
Fjórða skrefið er að reikna snúninginn.Með því að samþætta gögnum um hraðahraða er hægt að reikna út snúningshorn hlutarins í hverjum ás.Þetta er hægt að gera með tölulegum samþættingartækni eins og aðferð Euler eða Longe-Kutta aðferðinni til að reikna út hornið.
Fimmta skrefið er að sameina gögnin.Við sameinum gögnin frá hröðunarmælum og gyroscopes til að fá fullkomna viðhorf og stöðuupplýsingar hlutarins.Þetta er hægt að gera með því að nota reiknirit eins og quaternion-undirstaða viðhorfslausn eða Euler Angle Solver.
Sjötta skrefið er að sjá niðurstöðurnar.Við umbreytum reiknuðum hlutarhreyfingarbraut í mengi punkta í 3D hnitakerfi og birtum það með því að nota viðeigandi sjónræn verkfæri til að fá innsæi skilning á hreyfibraut hlutarins og viðhorfsbreytingum.
Algengar spurningar [FAQ]
1. Hversu nákvæm er MPU6050?
Áunnin niðurstöður sýndu næga nákvæmni minna en 1 % og áreiðanleika, sem tryggði rétta vídd lyftuásarinnar og háa staðla lyftuiðnaðarins.
2. Hvernig á að lesa gögn frá MPU6050?
Til að lesa innri MPU6050 skrárnar sendir meistarinn upphafsskilyrði, fylgt eftir með I2C þrælafanginu og skrifbit, og síðan skráðarfangið sem er að fara að lesa.
3. Hvar er MPU6050 notað?
Í áþreifanlegum heilsufarslegum, líkamsræktarbúnaði.Í dróna og quadcopters er MPU6050 notað til að stjórna staðsetningu.Notað til að stjórna vélfærafræði.Handbragðstýringartæki.
4. Er mpu6050 imu?
MPU6050 IMU skynjari blokkin les gögn frá MPU-6050 skynjara sem er tengdur við vélbúnaðinn.Blokkin framleiðir hröðun, hornhraða og hitastig meðfram ásum skynjarans.
5. Hver er vinnsla MPU6050?
Þetta er um borð í örgjörva MPU6050 sem sameinar gögnin sem koma frá hröðunarmælinum og gyroscope.DMP er lykillinn að því að nota MPU6050 og er útskýrt í smáatriðum síðar.Eins og með alla örgjörva þarf DMP vélbúnaðar til að keyra.
aðgerðarpróf.Helstu hagkvæmar vörur og besta þjónustan er eilíf skuldbinding okkar.
Heitt grein
- Eru CR2032 og CR2016 skiptanleg
- MOSFET: Skilgreining, vinnandi meginregla og val
- Uppsetning og prófun gengi, túlkun á raflögn fyrir raflögn
- CR2016 vs. CR2032 Hver er munurinn
- NPN vs. PNP: Hver er munurinn?
- ESP32 vs STM32: Hvaða örstýring er betri fyrir þig?
- LM358 Tvískiptur rekstrar magnari Alhliða leiðarvísir: Pinouts, hringrásarmyndir, jafngildi, gagnleg dæmi
- CR2032 VS DL2032 VS CR2025 Samanburðarhandbók
- Að skilja muninn ESP32 og ESP32-S3 tæknilega og frammistöðu greiningu
- Ítarleg greining á RC Series hringrás
 Að kanna getu og forrit NRF24L01 samskipta flís
Að kanna getu og forrit NRF24L01 samskipta flís
2024-04-25
 MMBT3904 NPN smári: Forskriftir þess, yfirgripsmikil umsóknarleiðbeiningar og MMBT3904 á móti MMBT5551
MMBT3904 NPN smári: Forskriftir þess, yfirgripsmikil umsóknarleiðbeiningar og MMBT3904 á móti MMBT5551
2024-04-25
Heitt hlutanúmer
 CC0805KRX7R7BB104
CC0805KRX7R7BB104 GRM0225C1E1R6WA03L
GRM0225C1E1R6WA03L TMJ212CB7225MGHT
TMJ212CB7225MGHT GQM2195C2E6R0DB12D
GQM2195C2E6R0DB12D C1608X7R1H102M
C1608X7R1H102M- GRM2195C2A4R7CD01D
 IRF7103TRPBF
IRF7103TRPBF RO3300E
RO3300E MAX31180AUA+T
MAX31180AUA+T EPM3032ATI44-10N
EPM3032ATI44-10N
- IRS2004SPBF
- ISL3153EIBZ-T
- PYF14A-E
- T491C225M035ZT
- STPS1L40A
- MC74AC00DTR2
- MC14040BD
- T491C226M016ZTAU00
- LM2931Z-5.0
- 55A0111-24-1
- LX5530LQ-TR
- BQ24172RGYR
- TL1451ACPWRG4
- ADG201HSKR
- LTC2486CDE#PBF
- ACMD-7601-NK1
- BD7902HFS-E2
- CY7C025AV-25AC
- DS3030W-100
- EMIF05-MUX01F2
- GM8180SS-BD
- HC4P-50565
- MN101C485WA
- SAA7182WP
- SP3073EEN
- STC6602ST6RG
- BFQ19S H6327
- CXA3202R
- CYW2338ZI
- OR2C06A-2T144
- SLDB105S
- PMB6754FV1.605
- TMS320C6416GLZC
- CX20470-11P2
- IDT95V857AHLFT
- M82910G-13
- HDMI-001S
- ATF22V10C 10PU
- LT16412IS8#PBF